
概述
Inertial Labs 开发了专业版本的运动参考单元 (MRU-PD),以满足海洋和水文应用的要求。MRU-PD是一款增强型高性能捷联式运动传感器 - 经济实惠的测量解决方案,可确定安装它的任何设备的纵摇、横摇、升沉、纵荡、横荡、加速度、角速率、航向、速度和位置等。
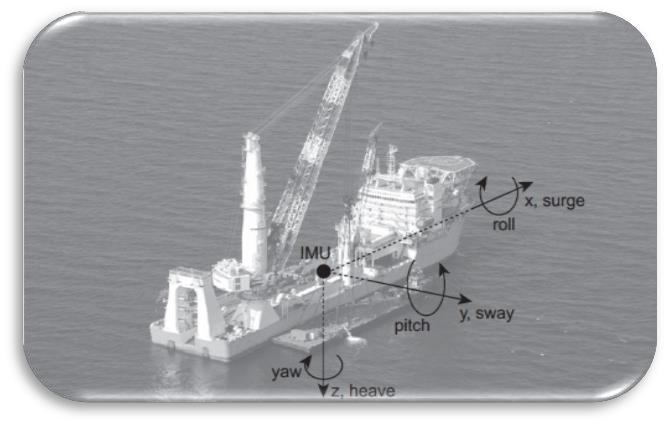
Inertial Labs MRU-PD 运动参考单元采用高精度双天线GNSS接收机,具有DGPS和RTK级别定位精度、固态3轴精密加速度计、磁力计、陀螺仪和气压传感器,以提供准确的被测设备的位置、航向、升沉、纵荡、横荡、纵摇和横摇。 极低噪声陀螺仪的集成为船舶、船舶、直升机、ROV、船用天线、起重机等绕所有三个旋转轴旋转提供了高频的实时测量数据。
我们的 MRU 具有自主开发的微g 偏置运行稳定性基于微机电系统 (MEMS) 的加速度计。 新一代 Inertial Labs 的1 度/小时偏置运行稳定性,基于 MEMS 的陀螺仪是要求苛刻的海洋应用的理想解决方案,其电子特性解决了与昂贵的机械陀螺解决方案以及基于光纤( FOG)方案相关的技术问题。 Inertial Labs MEMS 陀螺仪为行业树立了标准,我们的高端 MRU 采用的陀螺仪,可实现行业领先的精度和可靠性标准。
主要特点和功能
• 三合一解决方案:MRU + DGPS/RTK + HDT
• Kongsberg/Seatex、SMC 和 TSS 数据格式* • 兼容SBES/MBES
• 支持DVL的输入 - 多普勒速度记录
• 符合 IHO SP44 标准
• DGPS/RTK级定位精度
• IP-67 或海底外壳
• 5 厘米升沉(Heave)精度
• 0.05 度航向(Heading)精度
• 0.02 度纵摇(Pitch)和横摇(Roll)精度
• 0.005 m/sec2 加速度精度
• 0.0002 deg/sec角速率精度
• NMEA 0183,TSS1 数据格式输出
技术规格
| 参数 | 单位 | MRU-PD |
|---|---|---|
| 输出信号 | 升沉(Heave),纵荡(Surge), 横荡(Sway), 航向/航偏(Heading/Yaw), 纵摇(Pitch), 横摇(Roll), 位置(Positions), 速度 (Velocities), 加速度(Accelerations), 角速率(Angular rates), 气压数据(Barometric data), PPS时间(PPS time) |
|
| 输出数据格式 | Kongsberg/Seatex, Ship Motion Control SMC, Teledyne TSS* | |
| 输入信号 | DVL (Doppler Velocity Log), 外置独立磁罗盘 | |
| 兼容性 | • SBES/MBES: Teledyne; R2Sonic; WAASP; Kongsberg; EdgeTech; NORBIT; IMAGENEX* • HYPACK, QINSY, Novatel Inertial Explorer software* • DP-1, DP-2, DP-3, AHC, HMS, Survey systems |
|
| 更新率 | Hz | 1 … 200 (user settable) |
| 内置数据记录器 | 64 GB (optional) | |
| 升沉(Heave), 纵荡(Surge), 横荡(Sway) | 单位 | MRU-PD |
|---|---|---|
| 量程 | meters | ±300 |
| 分辨率 | meters | 0.01 |
| 实时精度, RMS | % (meters) | 5 (0.05) |
| 后处理精度, RMS | % (meters) | 2 (0.02) |
| 纵摇(Pitch) & 横摇(Roll) | 单位 | MRU-PD |
|---|---|---|
| 量程: Pitch, Roll | deg | ±90, ±180 |
| 角度分辨率 | deg | 0.005 |
| 静态精度 | deg | 0.01 |
| 动态精度 | deg RMS | 0.02 |
| 后处理精度 | deg RMS | 0.006 |
| 航向(Heading) | 单位 | MRU-PD |
|---|---|---|
| 量程 | deg | 0 - 360 |
| 角度分辨率 | deg | 0.001 |
| 实时静态和动态精度 | deg | 0.08 (2 meters baseline) |
| 实时静态和动态精度 | deg | 0.05 (4 meters baseline) |
| 后处理精度 | deg RMS | <0.03 |
| 位置,速度和时间戳 | 单位 | MRU-PD |
|---|---|---|
| 水平定位精度 (SBAS), RMS | meters | 0.6 |
| 水平定位精度 (DGPS), RMS | meters | 0.4 |
| 水平定位精度 (RTK), RMS | meters | 0.01 |
| 水平定位精度 (Oceanix Nearshore) (1), RMS | meters | 0.03 |
| 水平定位精度 (VERIPOS) (1), RMS | meters | 1-0.05 |
| 水平定位精度 (PPK), RMS | meters | 0.005 |
| GNSS速度精度, RMS | meters/sec | <0.03 |
| IMU速度精度, RMS | meters/sec*√hr | <0.009 |
| PPS精度 | nano seconds | 20 |
| 陀螺仪 | 单位 | MRU-PD |
|---|---|---|
| 量程 | deg/sec | ±450 |
| 偏差运行稳定性 (RMS, Allan Variance) | deg/hr | 1 |
| 噪声密度 | deg/sec√Hz | 0.004 |
| 加速度计 | 单位 | MRU-PD |
|---|---|---|
| 量程 | g | ±8 |
| 偏差运行稳定性 (RMS, Allan Variance) | mg | 0.005 |
| 噪声密度 | mg√Hz | 0.015 |
| 气压计 | 单位 | MRU-PD |
|---|---|---|
| 量程 | hPa | 300 – 1100 |
| 偏差运行稳定性 (RMS, Allan Variance) | Pa | 2 |
| 噪声密度 | Pa/√Hz | 0.8 |
| 环境 | 单位 | MRU-PD |
|---|---|---|
| 工作温度 | deg C | -40 to +70 |
| 存储温度 | deg C | -50 to +85 |
| MTBF | hours | 100000 |
| 符合 EMCD、抗扰度/发射 | / | IEC 60945/EN 60945 |
| 电气 | 单位 | MRU-PD |
|---|---|---|
| 电压 | V DC | 9 - 36 |
| 功耗 | Watts | 5 (6 with data logger) |
| 接口 | / | RS-232 / RS-422 / Ethernet / CAN |
| 数据格式 | / | NMEA 0183, TSS-1, Binary ASCII characters |
| 物理 | 单位 | MRU-PD (IP-67) | MRU-PDS (Subsea) |
|---|---|---|---|
| 尺寸 | mm | 120 x 50 x 53 | 245 x 140 x 115 |
| 重量 | kg | 0.320 | 6.5 |
 |  |
(1)需要订阅海洋数据服务,请联系Inertial Labs了解更多信息。





评论