

Oxford公司发布的xNAV650惯性导航系统(INS),是该公司迄今为止最小、最轻的INS。它的尺寸为77 x 63 x 24 mm,重量为130 g,可帮助测量人员在低有效载荷尺寸和重量情况下实现高精度的惯性测量。
xNAV650 INS具有广泛的应用,其中使用无人机是首选的数据采集方式,包括桥梁,建筑,林业和铁路勘测,沿海监测,管道勘探,制图等等。
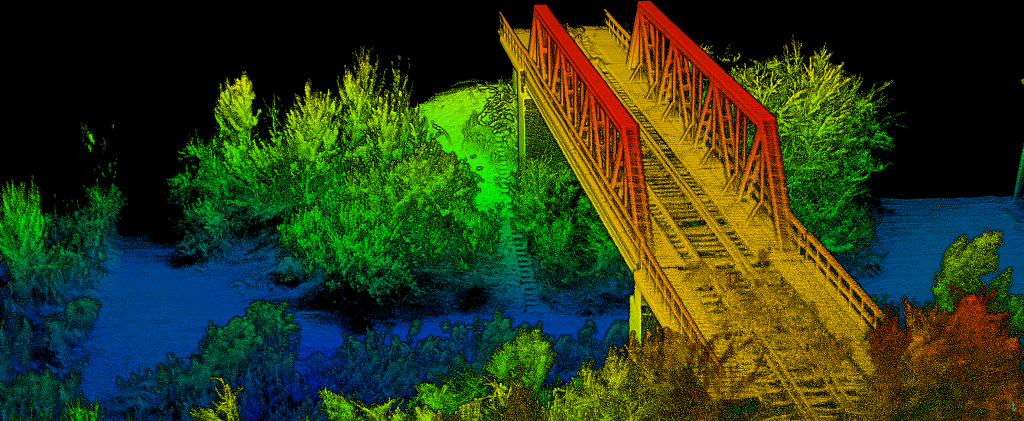
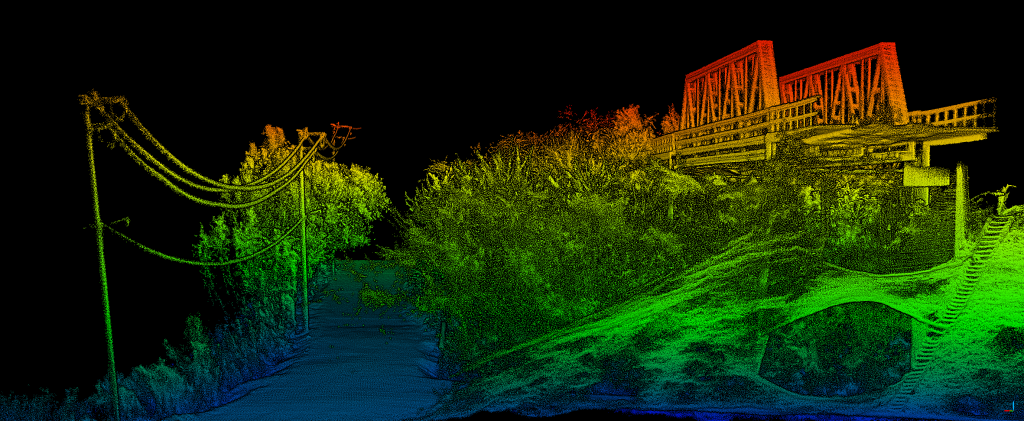
在一个应用案例中,Dronezone在无人机上使用xNAV650 INS和Velodyne VLP-16 LiDAR进行了老化桥梁的扫描,以查找过度生长的树叶造成的结构性危害和潜在危害。通过将来自INS的时间、位置和惯性数据与Velodyne VLP-16的原始数据融合在一起(使用OxTS的LiDAR地理配准软件OxTS Georeferencer),测量人员能够生成桥梁的高精度3D点云。由此产生的点云使工程师能够轻松准确地确定所关注的桥梁区域。
OxTS Georeferencer支持Velodyne,Hesai和Ouster LiDAR传感器的地理配准点云。该公司正在努力将更多制造商的新型LiDAR传感器集成到OxTS Georeferencer中。

OxTS NAVsuite软件包含在所有OxTS INS中。全套工具软件使OxTS设备的用户可以轻松配置和后期处理数据。系统还可以使用其他可选软件功能,包括精密网络时间协议(PTP)和gx/ix紧密耦合技术等。
- PTP允许通过以太网进行更简单的LiDAR设置,同时利用高质量的INS时钟源GNSS消除时间漂移。
- OxTS专有导航引擎GX/IX紧密耦合技术可确保OxTS惯性导航系统的用户即使在恶劣的GNSS条件下也能获得最准确的测量结果。





评论